Grounded Curriculum Learning for Robotics
Enhancing Real-World Reinforcement Learning through Adaptive Task Generation
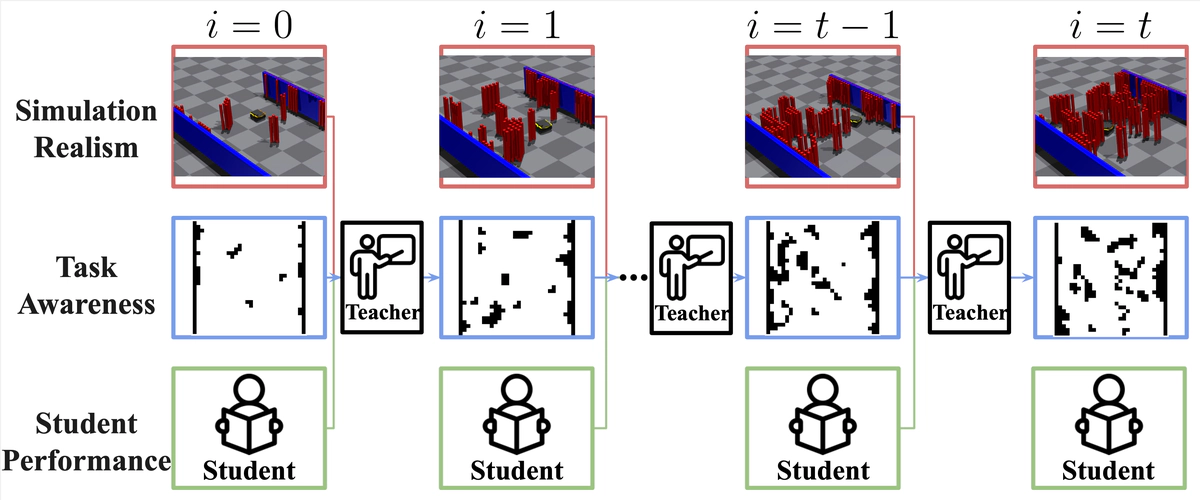 GCL Framework
GCL FrameworkIntroduction
In the field of robotics, Reinforcement Learning (RL) has shown great promise in enabling robots to learn complex behaviors. However, the high cost of real-world data collection has led to the widespread use of simulators for training. Despite efforts to improve simulator dynamics, there remains a significant mismatch between simulated and real-world task distributions. This mismatch is further exacerbated by existing Curriculum Learning (CL) techniques that generate tasks without considering their relevance to real-world scenarios.
To address these challenges, we introduce Grounded Curriculum Learning (GCL) , a novel framework designed to enhance real-world reinforcement learning in robotics.
Check our arxiv paper here, and watch our video for a detailed explanation.

Key Features of GCL
Simulation Realism: GCL aligns the simulated task distribution with real-world tasks, ensuring that learned skills are applicable to real-world scenarios.
Task Awareness: The framework explicitly considers the sequence of tasks given to the robot, allowing for more effective curriculum design.
Performance Tracking: GCL monitors the robot’s performance across previous tasks, enabling adaptive learning strategies.
Methodology
GCL employs a hierarchical structure with a fully-informed teacher agent guiding a student agent’s learning process. The framework consists of five main components:
- Task Representation via Latent Generative Model
- Student and Antagonist Agents
- Teacher Agent
- Grounding Simulated Tasks in the Real World
- Adaptive Curriculum Generation
Experimental Results
We evaluated GCL on The Benchmark for Autonomous Robot Navigation (BARN) Challenge, a standardized testbed for navigation in challenging and highly constrained environments. Our experiments demonstrate that GCL achieves:

- 6.8% higher success rate compared to state-of-the-art CL methods
- 6.5% higher success rate compared to a curriculum designed by human experts
These results highlight GCL’s ability to enhance both learning efficiency and navigation performance by grounding the simulation task distribution in the real world within an adaptive curriculum.
Conclusion and Future Work

GCL represents a significant advancement in curriculum learning for robotics, demonstrating the importance of grounding simulated learning in real-world task distributions. By balancing structured learning with flexibility, GCL ensures that learned skills are both efficiently acquired and applicable to real-world scenarios.
Future work directions include:
- Extending GCL to a broader range of robotic tasks beyond navigation
- Investigating methods for more effective latent space manipulation
- Exploring GCL’s potential in transfer and lifelong learning scenarios
- Integrating more structured learning approaches for robotics
Get Involved
If you’re interested in contributing to this project or have any questions, please feel free to reach out or check our GitHub repository for more information.