Linji (Joey) Wang
PhD Student in AI & Robotics
CS PhD at George Mason University
MechE MS at Carnegie Mellon University
MechE BS at University of Cincinnati
Short Bio
Linji (Joey) Wang is a PhD student in Computer Science at George Mason University, focusing on AI and Robotics. With a background in Mechanical Engineering from Carnegie Mellon University and the University of Cincinnati, Joey’s research explores the intersection of deep learning and robotics. His current work on Grounded Curriculum Learning demonstrates his commitment to enhancing real-world reinforcement learning in robotics through innovative AI techniques. Joey aims to leverage generative AI to bridge the gap between simulated and real-world task distributions, ultimately creating more adaptable and efficient robotic systems.
Experience
Research Assistant
- Grounded Curriculum Learning for Efficient Reinforcement Learning in Robotics
Teaching Assistant
- Introduction to Programming
Teaching Assistant
- Machine Learning
- Deep Learning
Research Assistant
- Computer Vision
- Augmented Reality
- 3D Scene Understanding
Education
PhD in Computer Science
MS in Mechanical Engineering
BS in Mechanical Engineering
BS in Mechanical Engineering
Recent Posts




Projects
*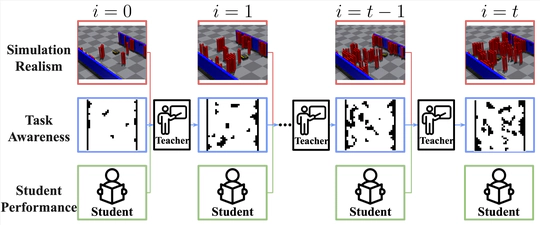

We introduce Grounded Curriculum Learning (GCL), a novel framework that improves real-world reinforcement learning in robotics by aligning simulated task distributions with real-world tasks while considering task sequences and robot performance history.
In this assignment, we implemented two types of GANs - a Deep Convolutional GAN (DCGAN) and a CycleGAN. The DCGAN was trained to generate grumpy cats from random noise, while the CycleGAN was trained to convert between two types of cats (Grumpy and Russian Blue) and between apples and oranges. Both GANs were implemented with data augmentation and differentiable augmentation techniques.
Gallery















Contact
Looking to get in touch? Whether you have a question, comment, or just want to say hello, I'd love to hear from you!
- joewwang@outlook.com
- +1 412-888-6071
- 5000 Forbes Ave, Pittsburgh, PA 15213
- Book an appointment